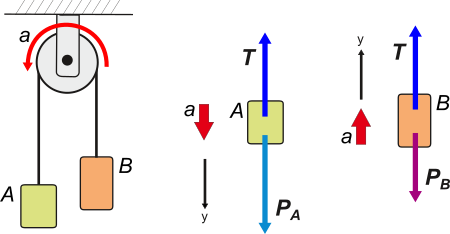
Hay que analizar varios detalles. Tal vez te sorprenda que elegí un sistema de referencia diferente para cada cuerpo. Se trata de costumbre nuestra que no es necesaria, pero es cómoda. Con los SR que yo elegí una aceleración positiva será positiva para ambos cuerpos.
Otra particularidad interesante es que la tensión, T, que hace la soga en cada extremo, o sea, sobre cada cuerpo, es la misma. Por eso no le puse subíndice.
OK, vamos a las ecuaciones.
Cuerpo A → ΣFy = mA . a → PA — T = mA . a [1]
Cuerpo B → ΣFy = mB . a → T — PB = mB . a [2]
Considerando datos a las masas, se convierte en un sistema de 2 ecuaciones con dos incógnitas, a y T. Hay que hallar la aceleración, cada uno lo hará como quiera. Acá tenés el camino que eligió No me salen.
Sumo miembro a miembro [1] y [2]
PA — T + T — PB = mA . a + mB . a
En el primer término se cancela T y en el segundo saco factor común a
PA — PB = ( mA + mB ) . a
Recuerdo que P = m . g, entonces...
mA . g — mB . g = ( mA + mB ) . a
Saco factor común g y despejo a
|