Para armar las de nuestra motocicleta tenemos que reemplazar las constantes, o sea, las que puse en azul:
Θ = ωA t + ½ γ . t²
ω = ωA + γ . t
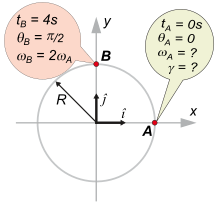
Pidámosles que hablen del punto B.
π/2 = ωA . 4 s + ½ γ . 16 s²
2 ωA = ωA + γ . 4 s
Acá hay dos ecuaciones con dos incógnitas, de modo que vamos a poder conocer el valor de ambas (en particular, la que nos interesa es ωA). De la segunda despejo la aceleración angular, γ.
γ = ¼ ωA s-1
Y eso lo meto en la primera:
π/2 = ωA . 4 s + ½ ¼ ωA s-1. 16 s²
π/2 = ωA . 4 s + ωA . 2 s
π/2 = ωA . 6 s
De donde, finalmente:
ωA = π/12 s-1
Por lo tanto:
ωB = π/6 s-1
A partir de las velocidades angulares podemos conocer las velocidades tangenciales:
vA = ωA . R = π/12 s-1 . 2 m = π/6 m/s
vB = ωB . R = π/6 s-1 . 2 m = π/3 m/s
Bueno... ya estamos llegando. Necesitábamos esas velocidades tangenciales porque el enunciado pregunta por la aceleración media, am, o sea:
am = ΔvAB / ΔtAB
am = (vB — vA) / 4 s
Operación sencillita siempre y cuando no te olvides de que la resta del paréntesis es una resta vectorial. |